Drive Ball
• It can display different color light;
• It can rotate clockwise and counter-clockwise;
• Each drive ball has one connector.
Indicator light instruction:
• The white cover of the drive ball is the lampshade. The default
color of the lampshade is white and and it can indicate eight
colors:
• Light modes: on, gradual pulsing, flashing, and off.
Operation parameters:
• Load-free rotate speed: 255rpm;
• Stalling torque: 1.2kg.cm;
• Load limit: 0.9 kg.
Attention:
· When the drive ball is loaded over its weight limit, it may
lead to abnormal rotation. Unloading is needed for proper
functioning or the ball will be damaged.
· No foreign matter should be placed between two balls to
impede rotation.
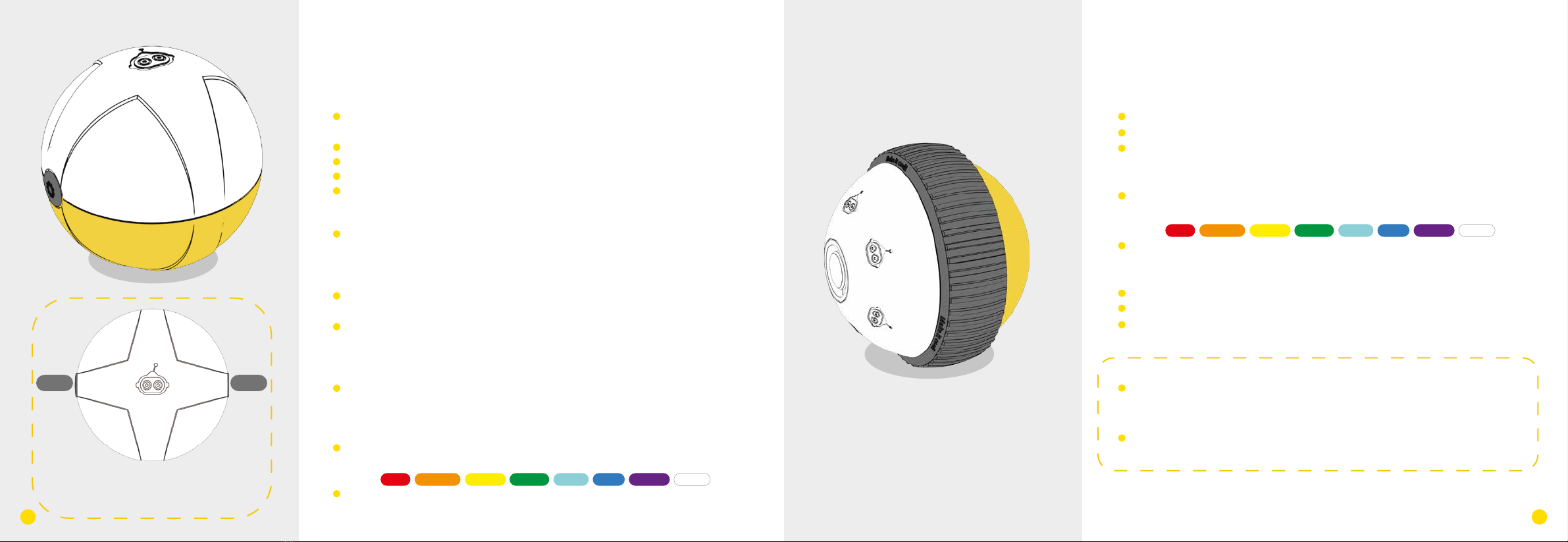
Control Ball
• It has modules for Bluetooth connection and a three-bracket
gyroscope;
• The Micro-USB port is for firmware upgrades only;
• It can display the status of the device;
• It can display different color lights;
• Each control ball has only one port.
Working Status:
• To start the system: Lampshade flashes once to show that it has
entered breathing mode (transform from a bright state to a dark
state), simultaneously chiming the tones for ‘Do Mi’ from the
buzzer;
• When the bluetooth is connected successfully: the lampshade
flashes twice, chiming “Do Re Me” from the buzzer;
• Downloading official programs: After successfully downloading,
the lampshade will flash green three times, playing a ‘Do Mi’
progression from the buzzer; if downloading fails, the lampshade
will flash red three times;
• Ready for self-balancing: the lampshade will flash blue three times
playing ‘Ti Ti’from the buzzer.
Light instructions:
• The white shade of the control ball is the lampshade. The default
color of the lampshade is white and and it can indicate 8 different
colors:
• Light activity: on, gradual pulse, flashing, and off.
Operating Instruction:
There are two buttons on the control ball; button 1
and button 2 share the same function: they can both
start or stop Mabot GO or other built-in programs
from the Mabot IDE coding card.;
button 1 button 2
The operating hub of Mabot for controlling performance of
other electronic components.
1 21
The module that can move on flat surfaces.
Red Orange Yellow Green Cyan Blue Purple White
Red Orange Yellow Green Cyan Blue Purple White