Pan-Tilt HAT User Manual
Version: V1.0.0; Date: 2019.03.16 2/ 17
CONTENT
Overview........................................................................................................................................................1
Specification ........................................................................................................................................1
Hardware.......................................................................................................................................................3
Controller..............................................................................................................................................3
Communication protocol................................................................................................................3
I2C Write data.............................................................................................................................3
I2C read data...............................................................................................................................4
I2C adress.....................................................................................................................................4
How to use ...................................................................................................................................................5
Download examples .........................................................................................................................5
Examples ...............................................................................................................................................6
Download examples to Raspberry Pi .................................................................................6
Install libraries.............................................................................................................................6
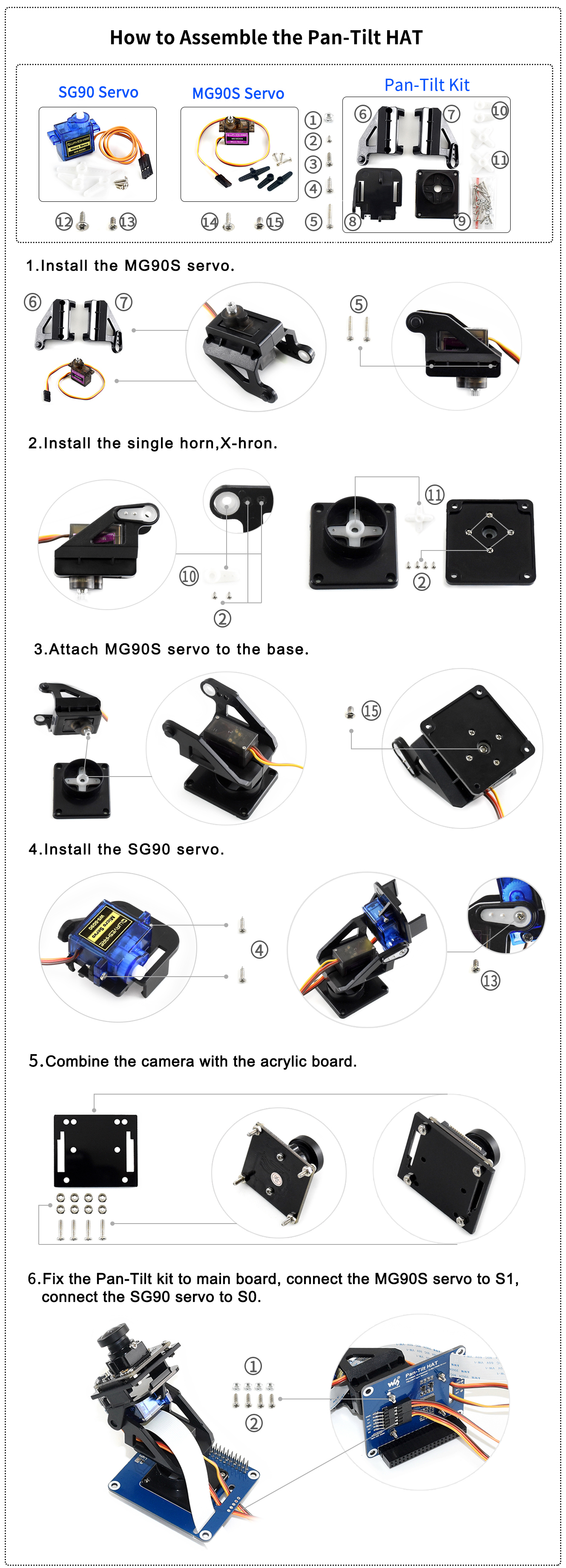
Assembly ......................................................................................................................................8
Servo and Light sensor.........................................................................................................10
Camera .......................................................................................................................................10
Web_Control ............................................................................................................................12
Expected result........................................................................................................................16
FAQ...............................................................................................................................................................17




























{kind=link}