SunFounder PiCar-S User manual
Preface
About SunFounder
SunFounder is a technology company focused on Raspberry Pi and Arduino open source
community development. Committed to the promotion of open source culture, we strive to
bring the fun of electronics making to people all around the world and enable everyone to
be a maker. ur products include learning kits, development boards, robots, sensor modules
and development tools. In addition to high quality products, SunFounder also offers video
tutorials to help your own project. If you have interest in open source or making something
cool, welcome to join us! Visit www.sunfounder.com for more!
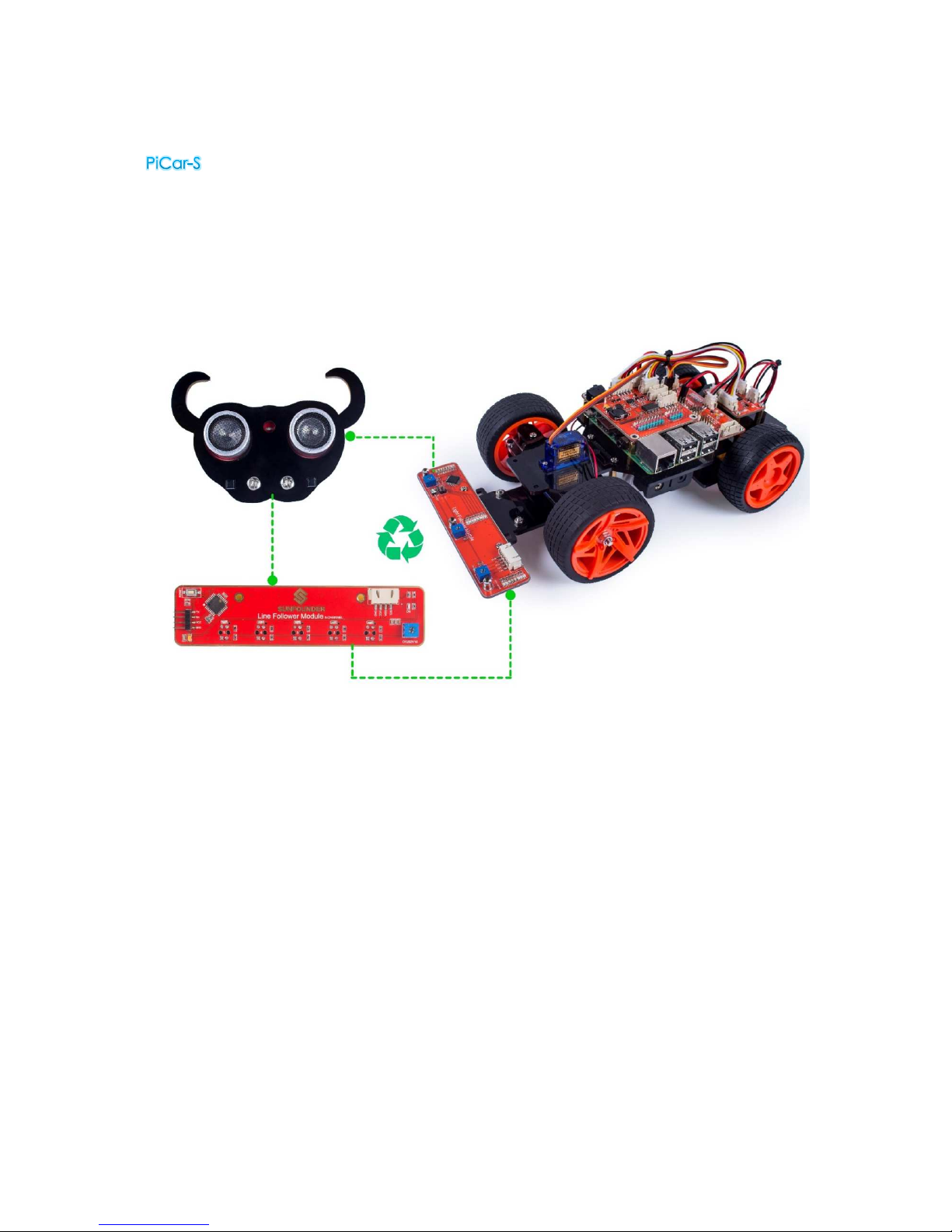
About the PiCar-S
The PiCar-S is a cool smart car that can work with Raspberry Pi model B+, 2 model B and 3
model B. Equipped with three sensor modules including ultrasonic obstacle avoidance, light
follower, and line follower, you can better learn the programming on how to control the car.
In this manual, we will show you how to build the PiCar-S via description, illustrations of physical
components, in both hardware and software respects. You will enjoy learning how all this work.
You may visit our website www.sunfounder.com to download the related code and view the
user manual on LEARN -> Get Tutorials and watch related videos under IDEO, or clone the
code on our page of github.com at
https://github.com/sunfounder/SunFounder_PiCar-S
You are welcome to pull requests and issue posts on our page on Github.
Free Support
If you have any TECHNICAL questions, add a topic under FORUM section on our website
and we'll reply as soon as possible.
For NON-TECH questions like order and shipment issues, please send an email to
service@sunfounder.com. You're also welcomed to share your projects on F RUM.

Contents
Components List ........................................................................................................................................1
Acrylic Plates ..........................................................................................................................................1
Servo Accessories .................................................................................................................................2
Mechanical Fasteners .........................................................................................................................2
Wires .........................................................................................................................................................3
PCB ...........................................................................................................................................................4
ther Components ..............................................................................................................................5
Tools ..........................................................................................................................................................6
Introduction .................................................................................................................................................7
Building the Car ..........................................................................................................................................7
Fixing Rear Wheels ................................................................................................................................7
Upper Plate ......................................................................................................................................... 10
Battery Holder ..................................................................................................................................... 11
Rear Wheels (Driving) ....................................................................................................................... 13
TF Card Guard .................................................................................................................................... 15
Front Half Chassis ............................................................................................................................... 16
Front Wheels ........................................................................................................................................ 17
Steering Part ........................................................................................................................................ 18
PCB Assembly ..................................................................................................................................... 20
Circuits Building .................................................................................................................................. 21
Software Installation .......................................................................................................................... 23
1.
Log into Raspberry Pi .............................................................................................................. 23
2.
Get Source Code .................................................................................................................... 23
3.
Go to the Code Directory ..................................................................................................... 24
4.
Install the Environment ........................................................................................................... 24
Adjust the Servo to 90 Degrees ..................................................................................................... 25
Build the Rest of the Car .................................................................................................................. 26
Configuration ...................................................................................................................................... 28
Arming the Car! ....................................................................................................................................... 32
Ultrasonic bstacle Avoidance .................................................................................................... 33
How the bstacle Avoidance Works ..................................................................................... 33
Principle ........................................................................................................................................... 33
Procedures ..................................................................................................................................... 33

Software Flow ................................................................................................................................ 35
Code Explanation ........................................................................................................................ 37
Light Following .................................................................................................................................... 38
How It Works ................................................................................................................................... 38
Principle ........................................................................................................................................... 38
Procedures ..................................................................................................................................... 39
Software Flow ................................................................................................................................ 41
Code Explanation ........................................................................................................................ 44
Line Following ..................................................................................................................................... 45
How to Follow Lines ...................................................................................................................... 45
Principle ........................................................................................................................................... 45
Procedures ..................................................................................................................................... 45
Software Flow ................................................................................................................................ 49
Code Explanation ........................................................................................................................ 53
Combination ....................................................................................................................................... 54
Appendix .................................................................................................................................................. 57
Appendix 1: Modules ....................................................................................................................... 57
Robot HATS ..................................................................................................................................... 57
PCA9865 .......................................................................................................................................... 58
TB6612 .............................................................................................................................................. 59
Line Follower Module ................................................................................................................... 59
Light Follower Module ................................................................................................................. 60
Ultrasonic bstacle Avoidance Module ............................................................................... 61
SunFounder SF0180 Servo ........................................................................................................... 61
WiFi Adapter .................................................................................................................................. 62
DC Gear Motor ............................................................................................................................. 62
1
Components List
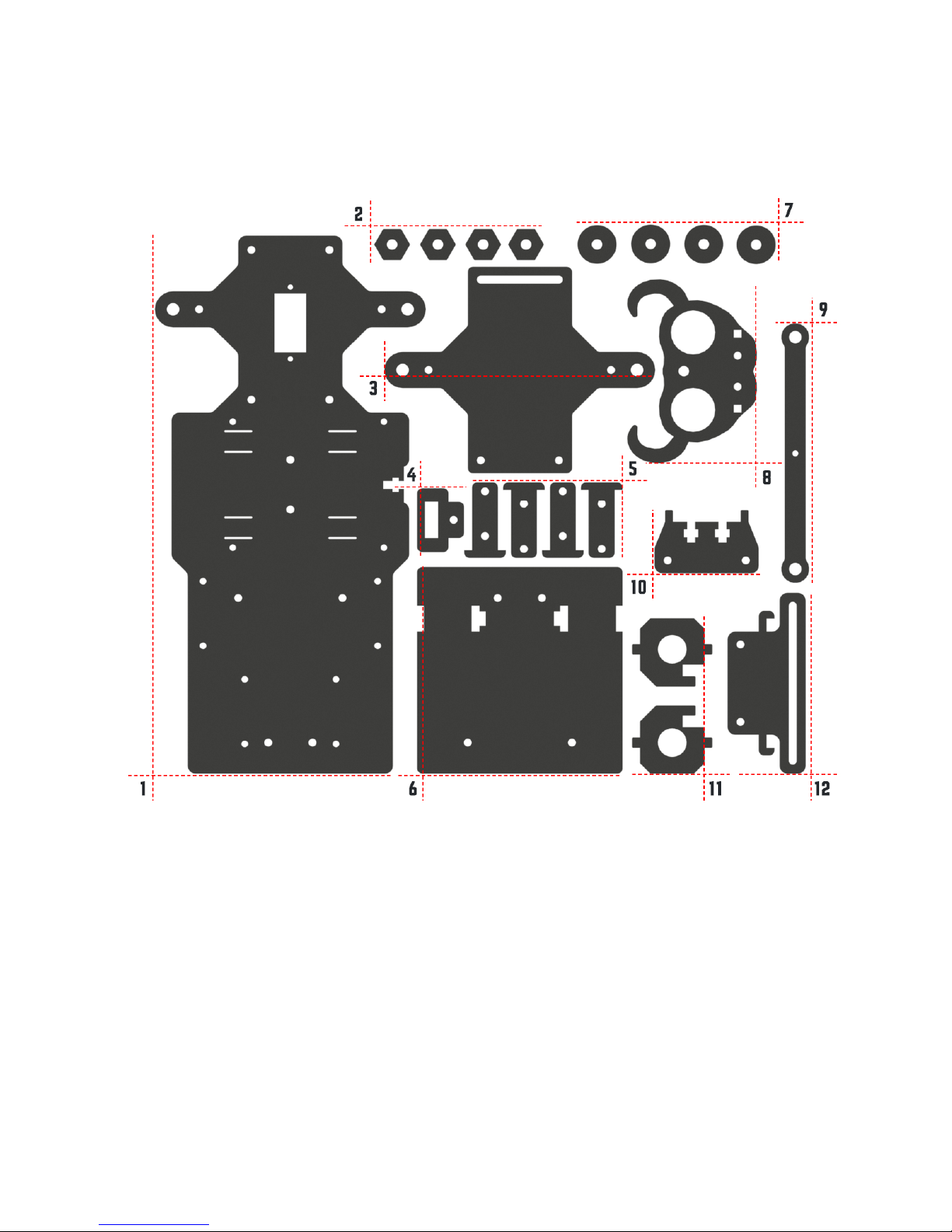
Acrylic Plates
1. Upper Plate x 1
2. Hex Front Wheel Fixing Plate x 4
3. Front Half Chassis x 1
4. TF Card Guard x 1
5. Motor Support x 4
6. Back Half Chassis x 1
7. Bearing Shield x 4
8. Ultrasonic Connector x 1
9. Steering Linkage x 1
10. Ultrasonic Support x 1
11. Steering Connector x 2
12. Sensor Connector x 1
2
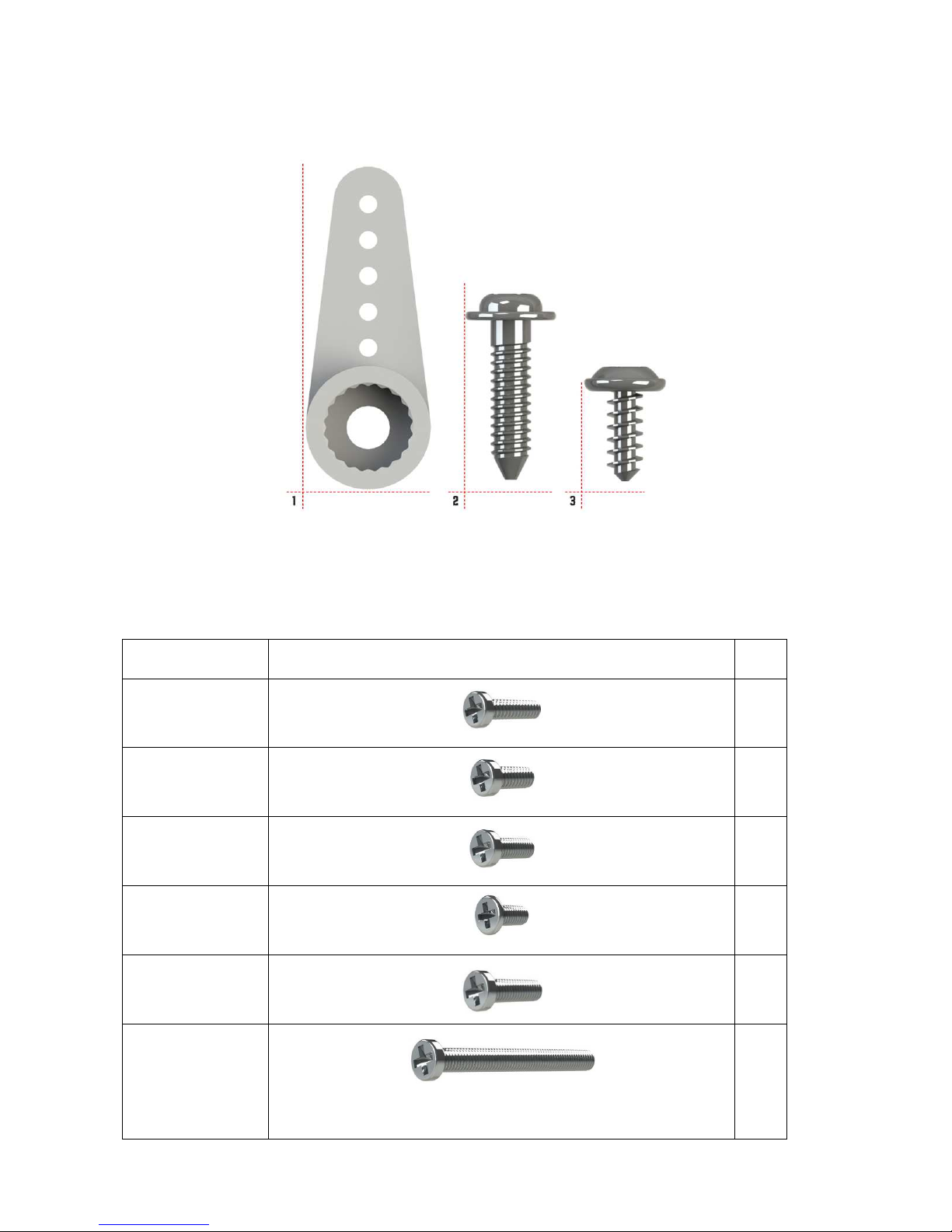
Servo Accessories
The following three parts will be used in the servo package:
1. Rocker Arm
2. Rocker Arm Screw
3. Rocker Arm Fixing Screw
Mechanical Fasteners
Name Component Qty.
M2x8 Screw
2
M2.5x6 Screw
12
M3x8 Screw
8
M3x8
Countersunk
Screw
2
M3x10 Screw
9
M3x30 Screw
4
3
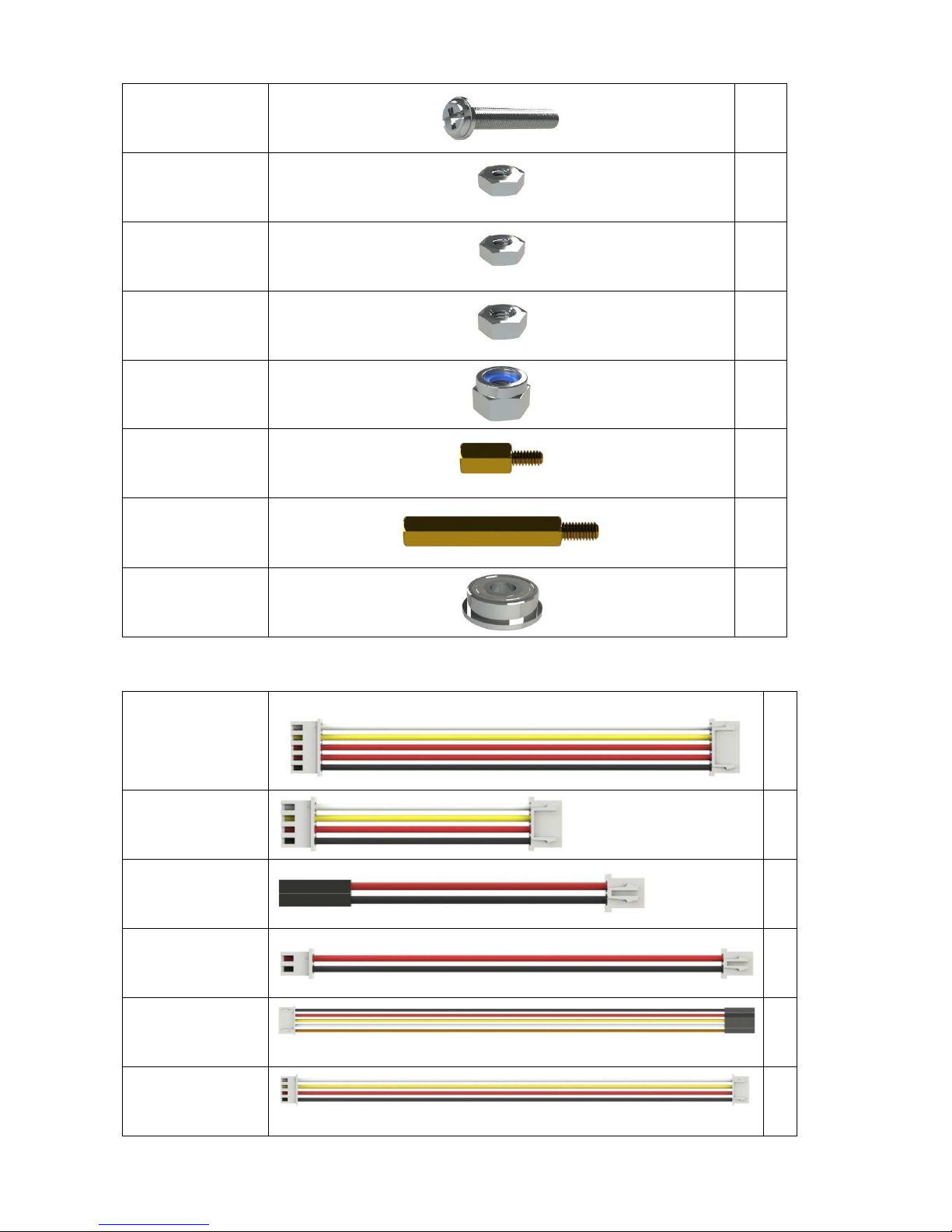
M4x25 Screw
2
M2 Nut
2
M2.5 Nut
12
M3 Nut
23
M4 Self-locking
Nut
2
M2.5x8 Copper
Standoff
16
M3x25 Copper
Standoff
8
4x11x4 F694ZZ
Flange Bearing
2
Wires
100mm HX2.54
5-Pin Jumper
Wire
1
50mm HX-2.54 4-
Pin Jumper Wire
1
50mm HX-2.54 2-
Pin Jumper Wire
1
100mm HX-2.54
2-Pin Jumper
Wire
1
200mm HX2.54
5-Pin Jumper
Wire
1
200mm HX-2.54
4-Pin Jumper
Wire
1
4
200mm HX2.54
3-Pin Jumper
Wire
1
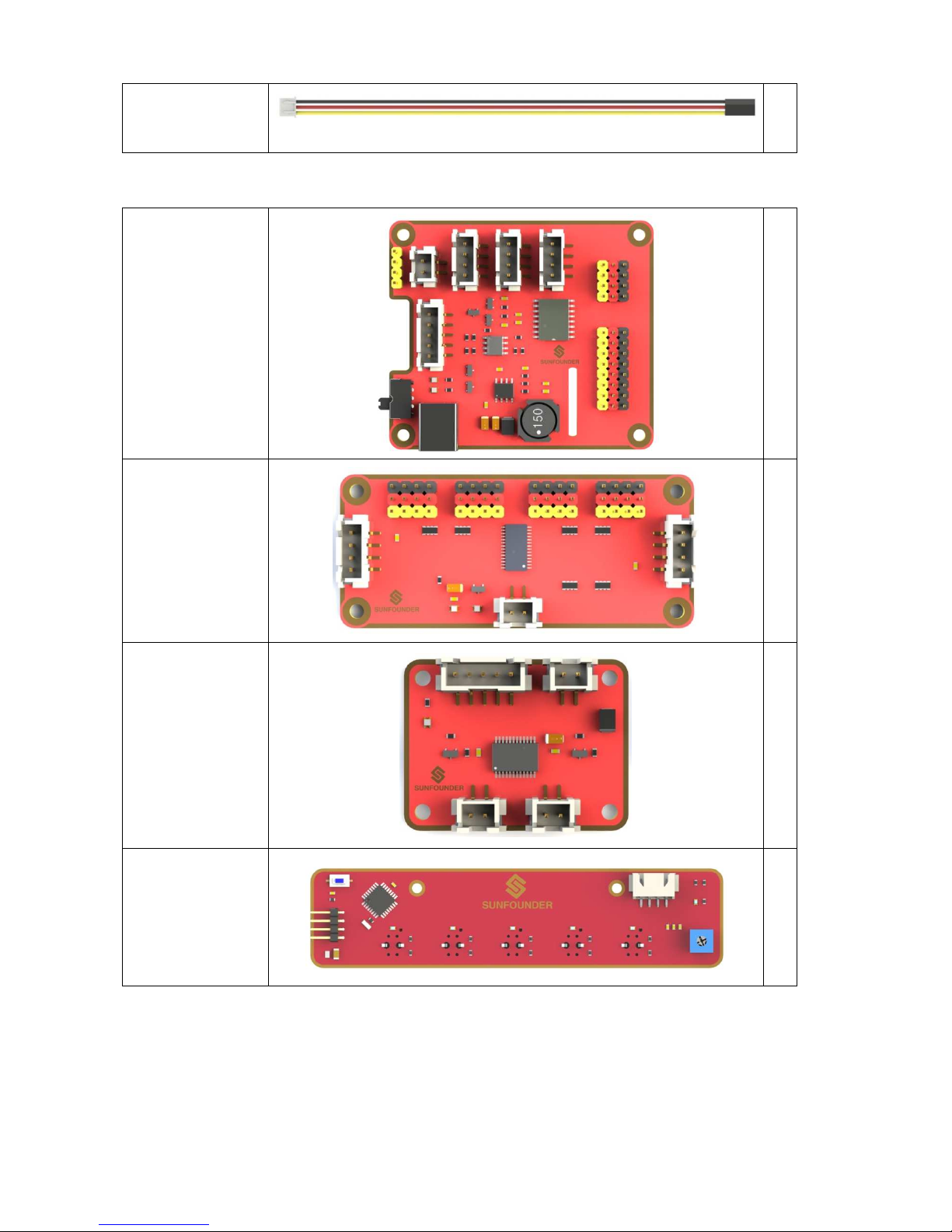
PCB
Robot HATS
1
PCA9685 PWM
Driver
1
TB6612 Motor
Driver
1
5-CH Line
Follower Module
1
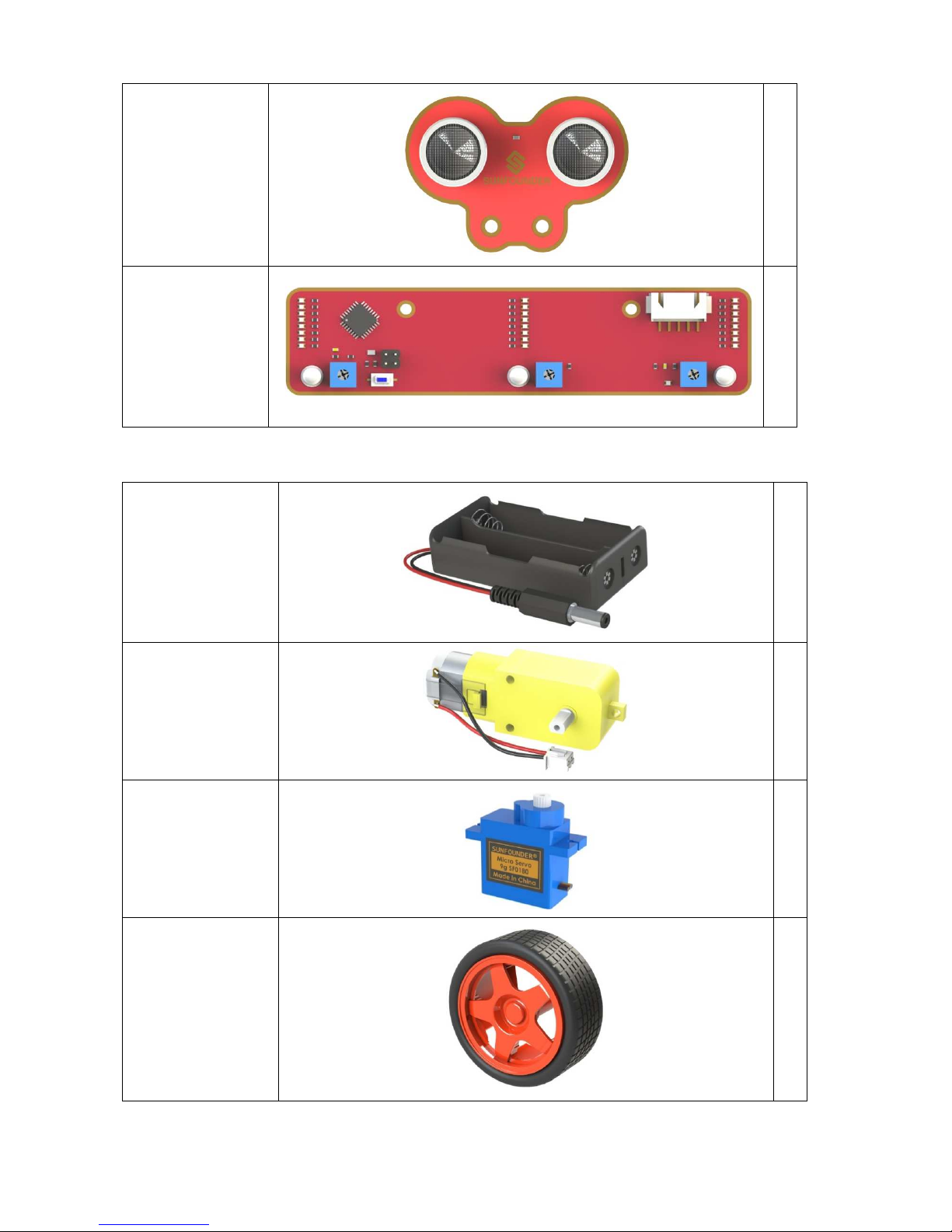
5
Ultrasonic
bstacle
Avoidance
Module
1
Light Follower
Module
1
Other Components
2x18650 Battery
Holder
1
DC Gear Motor
2
SunFounder
SF0180 Servo
1
Rear Wheel
2
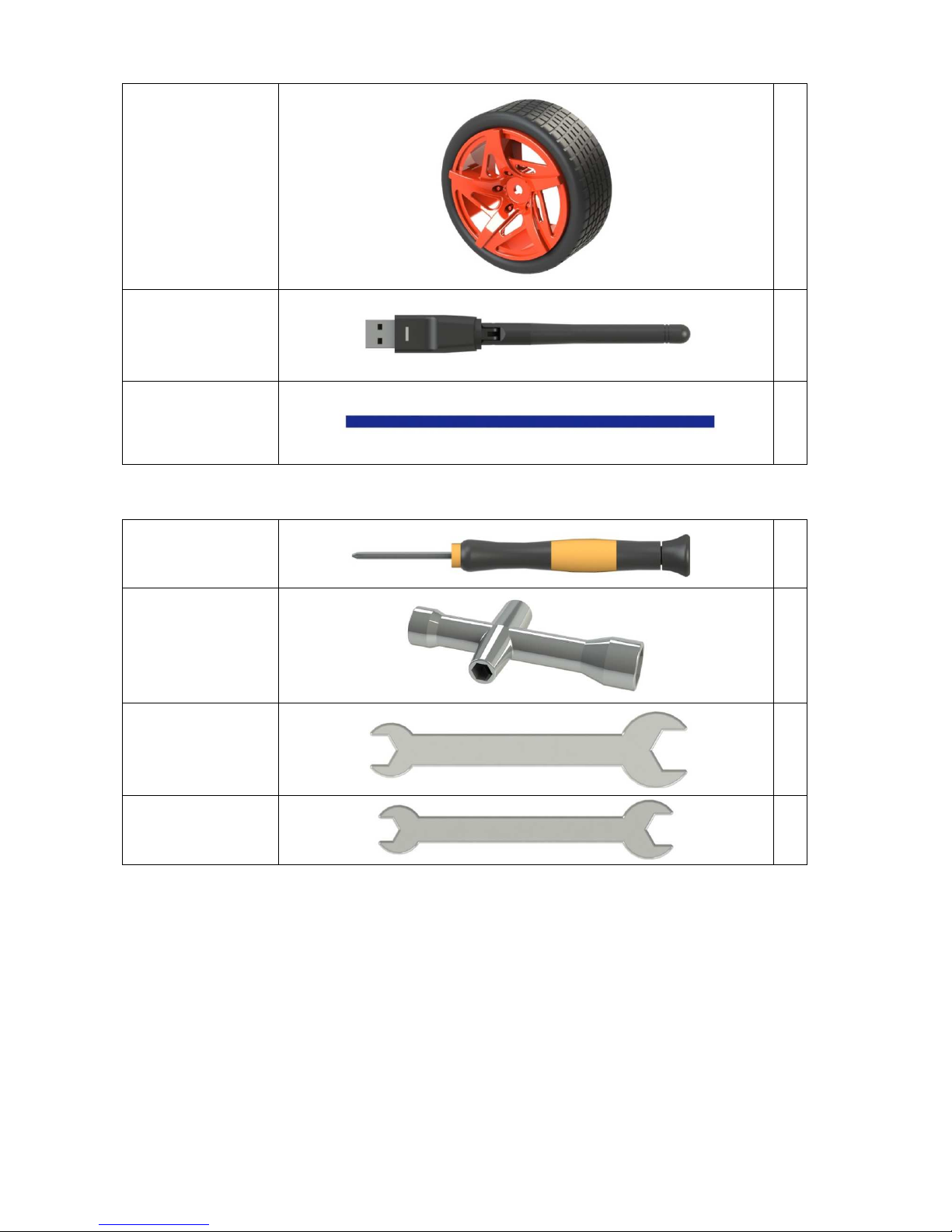
6
Front Wheel
2
USB Wi-Fi Adapter
1
Ribbon (30cm) 1
Tools
Cross Screwdriver
1
Cross Socket
Wrench
1
M2.5/M4 Small
Wrench
1
M2/M3 Small
Wrench
1
7
Introduction
The is a SMART SENSOR car robot based on Raspberry Pi, which comes with three sensor
modules, including the light follower, line follower and ultrasonic obstacle avoidance. With
these modules, this smart car is capable of some simple automatic actions. Thus, you can
learn some basics of programming in Python to control the car with these sensors. Let’s start
with building this smart car!
Building the Car
Extremely excited when opening the box and checking so many components? Keep your
patience and take it easy. Please note that some details in the following steps need CAREFUL
observation. You should double-check your work based on the figures in the manual after
finishing each step. Don’t worry! Kindly reminders will be given in some particular steps. Just
follow the tutorial step by step. kay, with no further ado, now let’s start!
Fixing Rear Wheels
Assemble the Motor Support Plate into the Back Half Chassis as shown below.
Other manuals for PiCar-S
2
Table of contents
Other SunFounder Motorized Toy Car manuals





















